Walkability Chapter 5: Evaluation (Part 3: Path Generation)
Categories:WalkabilityAI/ML
Semantically-based Path Generation
With the semantically-based point-wise scores for general walkability from the last part and the four specific objectives (greenery, shopping, historicity, and safety), we revisit the exemplary routing scenarios. We demonstrate that our pipeline not only has the ability to generate more walkable paths but, unlike the baseline frameworks, can also leverage peculiar routing opportunities. We show how our approach can be used to address the shortcomings of existing frameworks, and improve the quality of path-finding solutions, answering our second research question.
Pedestrian-friendly Alternatives in the Supermarket-adjacent Walk
In the first routing problem (defined by the park-adjacent residential areas), it is primarily the general walkability and greenery objectives that resonate with the presented context.
Both greenery and general walkability paths use highly walkable park segments adjacent to a river. This is in stark contrast to the open-source baselines, where the generated paths tangle through homogeneous residential blocks (OSRM, GraphHopper), or merely follow busy but straightforward roads (Valhalla). A similar route to Valhalla’s (although guided by a very different rationale) is generated under the shopping objective and pursues proximity to stores that generally lie on the same streets Valhalla targets.

Moreover, the case for our preference-based paths is further supported by the total lengths of the generated paths. The considerably more pleasant walkability and greenery-focused paths remain only slightly longer than the OSRM or GraphHopper alternatives. Furthermore, the shopping, safety, and historically-focused paths are even shorter.
Table: Total distance of each path generated for the “supermarket-adjacent walk”
| Algorithm | Distance (meters) |
|---|---|
| GraphHopper | 1974.06 |
| OSRM | 2008.08 |
| Valhalla | 1805.71 |
| General Walkability | 2241.03 |
| Greenery | 2164.63 |
| Historical | 1884.81 |
| Safety | 1877.08 |
| Shopping | 1801.81 |
Maximizing Green Paths in the Long City-spanning Walk
Next, we revisit the spatially significant routing scenario. As discussed, here (similarly to the first scenario), path-finding is provided with an opportunity to encapsulate much of the prolonged tour into highly walkable environments, particularly parks. Nonetheless, as discussed earlier, the open-source frameworks largely ignore this opportunity and generate a path leading through mostly residential areas of underwhelming walkability.
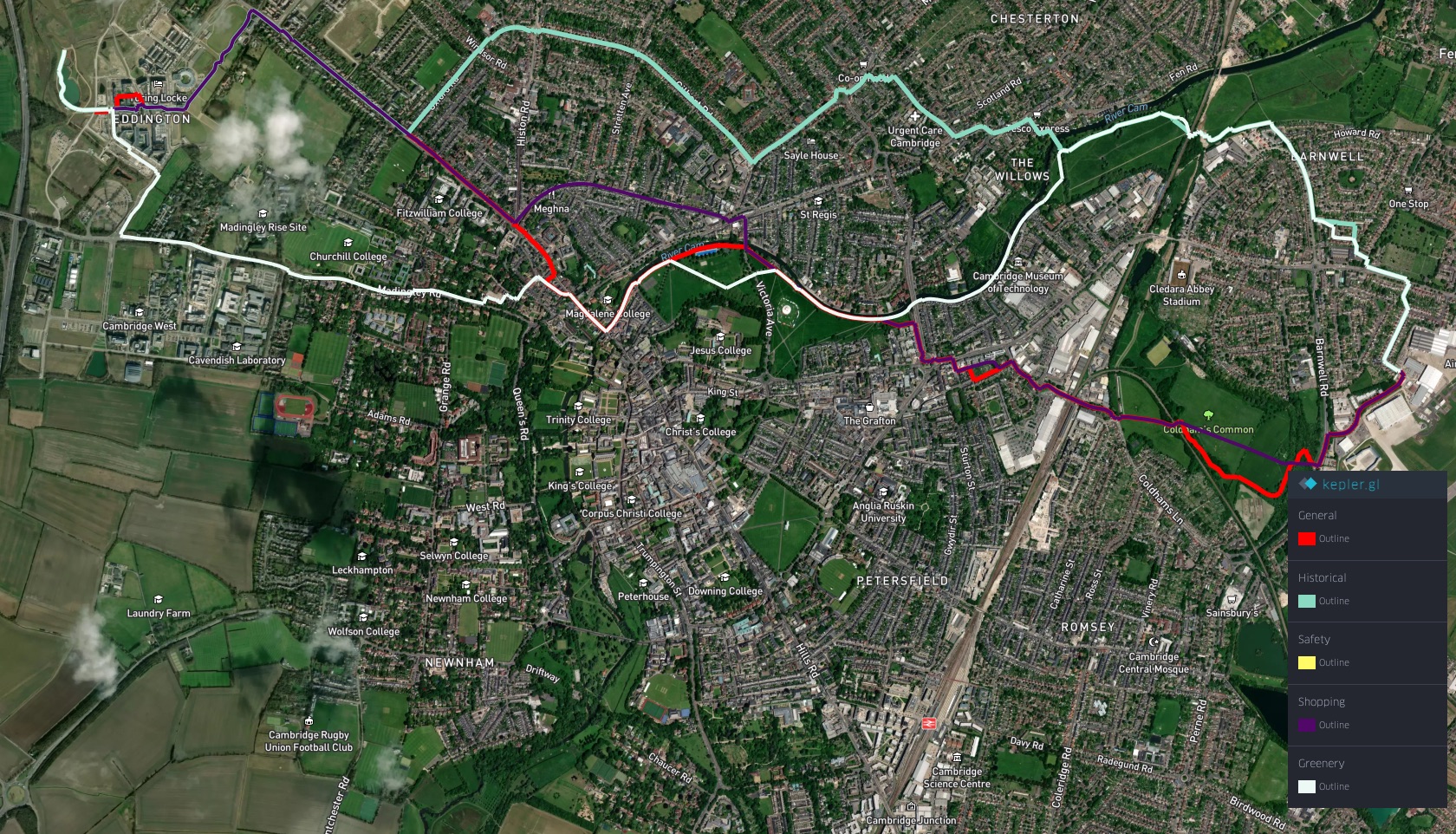
This, however, is not the case for our path generated under the greenery objective. This path maximizes the duration of green spaces, only diverging when necessary. In contrast, as the general walkability scores are defined by a broader spectrum of factors, the path generated under their umbrella combines walkable urban areas with green spaces. The remaining three objectives (shopping, historicity, and safety) attempt to leverage the sparse relevant elements present in the adjacent residential areas. However, reflecting the character of the environment, none of the outputs present discussion-worthy features.
Table: Total distance of each path generated for the “long city-spanning walk”
| Algorithm | Distance (meters) |
|---|---|
| GraphHopper | 8284.38 |
| OSRM | 8165.23 |
| Valhalla | 8257.62 |
| General Walkability | 8568.04 |
| Greenery | 9103.54 |
| Historical | 8838.61 |
| Safety | 7928.67 |
| Shopping | 7928.67 |
The (atypically for urban pedestrian path-finding) large problem space is also reflected in the margins of the generated paths’ overall lengths. In the case of the greenery, the resulting path exceeds the open-source baselines by almost a kilometer. Nonetheless, considering this specific scenario, we argue that such a difference is still within reason.
Urban-Centered Variants in the Greenbelt Walk
In the next scenario, we study how our framework manages to prioritize diverse urban options over more greenery-based alternatives. As discussed earlier, using the open-source frameworks here overwhelmingly resulted in paths prioritizing the latter.

Ultimately, so did the paths generated under our walkability and greenery objectives. Our historical, safety, and shopping-related paths, nevertheless, produced much more interesting solutions. The shopping and safety-focused path maximizes the duration in the city, leveraging busy pedestrian segments surrounded by stores and other establishments. The historical path follows the same trajectory, before making a sharp turn to leverage a path through a late-Gothic university college.
Furthermore, as highlighted, the distances of the preference-based paths once again remain within a reasonable margin from the duration-optimizing baselines.
Table: Total distance of each path generated for the “greenbelt walk”
| Algorithm | Distance (meters) |
|---|---|
| GraphHopper | 2160.66 |
| OSRM | 2095.53 |
| Valhalla | 2088.55 |
| General Walkability | 2307.68 |
| Greenery | 2304.71 |
| Historical | 2080.30 |
| Safety | 2144.18 |
| Shopping | 2143.16 |
Opportunities in the City Center Walk
In the fourth scenario, characterized by a dense urban environment and a more modest spatial dimension, we demonstrate more nuanced abilities of our approach, particularly through the shopping-focused objective. While (particularly in this scenario) the paths generated by the open-source baselines served merely efficiency purposes, our shopping-focused assessment identified a nearby shopping mall as an area of strong interest, and subsequently situated its path to lead through it. Additionally, the walkability and greenery-focused objectives took advantage of a short segment adjacent to a park, and the safety-optimizing path remained close to busy roads, avoiding quieter roads and alleys.
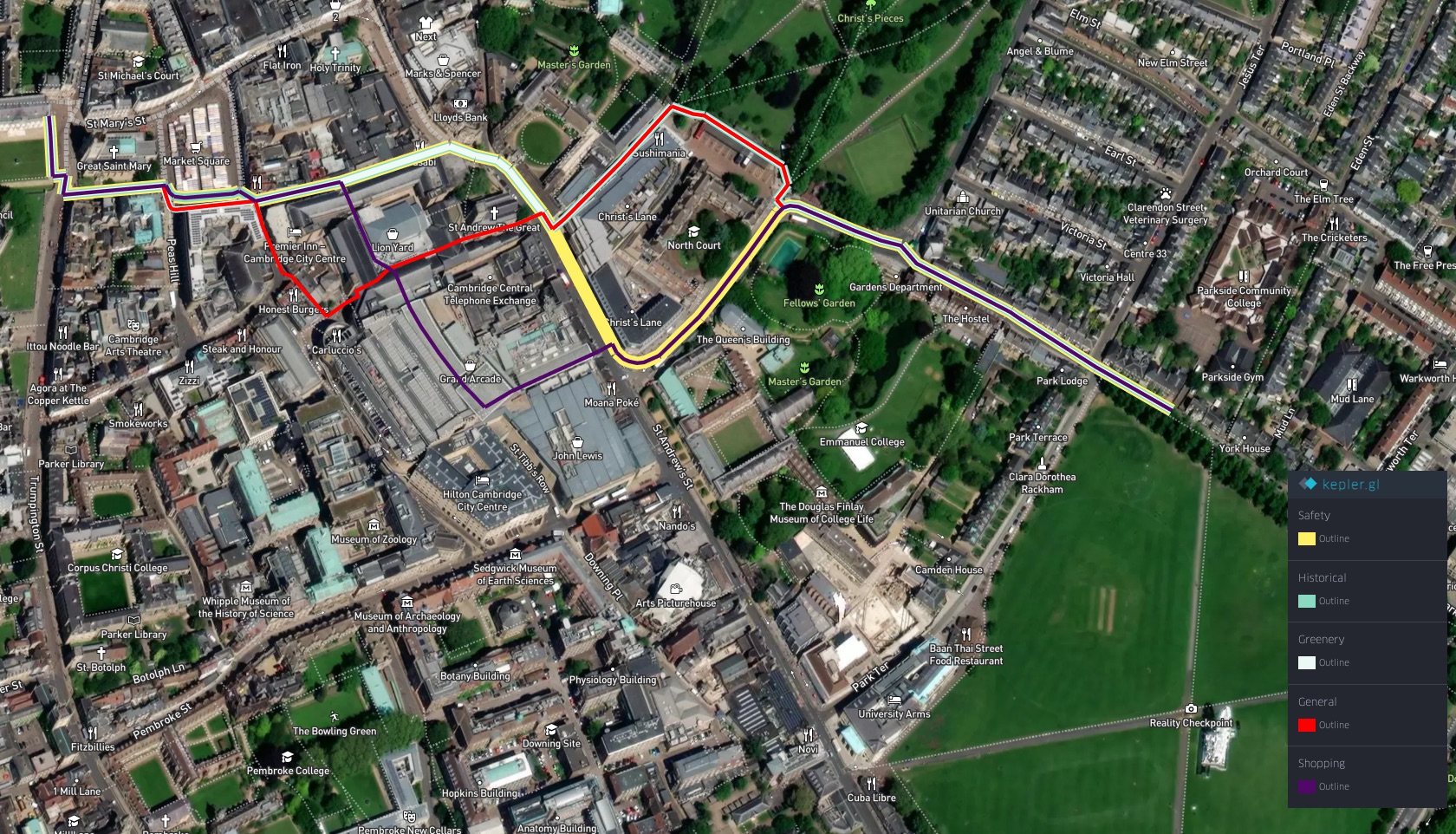
Our preference-based paths remained close to the open-source baselines in terms of overall distance. In fact, in this scenario, the longest road was generated by the Valhalla framework.
Table: Total distance of each path generated for the “city center walk”
| Algorithm | Distance (meters) |
|---|---|
| GraphHopper | 921.93 |
| OSRM | 1099.31 |
| Valhalla | 1106.36 |
| General Walkability | 946.31 |
| Greenery | 904.73 |
| Historical | 899.96 |
| Safety | 920.22 |
| Shopping | 940.45 |
Safer-focused Options in the Suburban Stretch Walk
Finally, we return to our last scenario situated within a dense but rather homogeneous residential area. Reflecting on the results generated by the open-source frameworks (particularly GraphHopper and OSRM), we use the safety-based objective to generate a contrasting path, mostly following a busy (and, by assumption, safer) road. As a segment, the most associated with relevant geospatial nodes, this road is also prioritized by the shopping-focused path. It must be noted that, once again, our shopping and safety-related paths share many similarities with the route generated by Valhalla. However, once again, we attribute this primarily to Valhalla’s attention to strictly segment-related features, such as junctions and crossings, that are entirely ignored in our method. Similarly, our general walkability, greenery, and historically-based preferences are projected in slightly longer paths, due to their various attempts to maximize their objective in a highly homogeneous environment.

Table: Total distance of each path generated for the “suburban stretch walk”
| Algorithm | Distance (meters) |
|---|---|
| GraphHopper | 2140.88 |
| OSRM | 2173.51 |
| Valhalla | 2071.77 |
| General Walkability | 2523.46 |
| Greenery | 2539.48 |
| Historical | 2265.97 |
| Safety | 2146.01 |
| Shopping | 2146.01 |
Discussion
In this chapter, we answer and use our pipeline to provide solutions to our three initial questions. We present specific routing examples that showcase common shortcomings of popular path-finding frameworks, particularly as they disregard highly walkable routing opportunities. We leverage our point-wise assessment and path-finding pipeline to generate walkability and preference-based routes, addressing the stated shortcomings and improving upon the existing methods. We show that our pipeline can accurately identify urban points of particular interest, and our path-finding search can effectively utilize them in its solutions. Finally, we highlight the accessibility to user-specific preferences, enabled with our natural language-based approach. In sharp contrast to existing frameworks, preferences in our framework are defined with plain sentences.
Besides illustrating a novel method to pedestrian path-finding, our examples also highlight the importance of public geospatial datasets, particularly OSM. As demonstrated, the quality of our framework’s outputs is extremely dependent on the accuracy and descriptiveness of the data provided by OSM. This is particularly well illustrated by our safety-focused objective, which relies on a very specific selection of geospatial elements. Nonetheless, besides the many benefits, the open-source nature of OSM also imposes its sets of various dangers, and actively contributing communities are essential to prevent dishonest use of these resources. Particularly in frameworks such as ours, unbalanced data coverage or intentionally misleading records can lead to skewed outputs, potentially helping malicious (e.g., profit-driven) intents. Nonetheless, such dangers can be minimized by active community-led revisions of the datasets.